ODEs 3
- System of equations
- Higher order derivatives
- Decoupled ODEs
- Adaptive time steps
ODE system
-
So far we have considered $dy/dt = f(y,t)$, with one equation in one variable.
-
For a system of ODEs, we have $d\vec{y}/{dt} = \vec{f}(\vec{y},t).$
- For example, for 2 ODEs in 2 variables: $$ \frac{dx}{dt} = g(x,z,t), $$ $$ \frac{dz}{dt} = h(x,z,t).$$
- We can write this as $$ \frac{d\vec{y}}{dt} = \vec{f}(\vec{y},t),$$
where $x=y[0]$, $z=y[1]$, $g=f[0]$ and $h=f[1]$.
- Note that each rate depends (in general) on all the variables.
- Note, below, we’ll leave off the vector arrow symbols for simplicity.
-
Explicit solution is a straightforward extension of the one equation case. Python’s array functionality even allows nearly identical codes for systems of equations and for one equation.
-
Implicit solutions require solution of a linear system of equations at each step for linear ODE systems. For nonlinear ODE systems, a nonlinear system must be solved at each step.
- Linear:
$$f(y) = Ay + b,$$
$$ y_{k+1} = y_k + \Delta t(Ay_{k+1}+b),$$
$$(I-\Delta tA)y_{k+1} = (y_k + \Delta tb).$$
This last equation has the form $By_{k+1}=c$, which is a linear system solved for $y_{k+1}$ at each step.
- Note, $A$ and $b$ can depend on time, which is not explicitly shown.
- Nonlinear:
$$y_{k+1} = y_k + \Delta t f(y_{k+1},t).$$
- Rearrange and solve the following nonlinear system for the $y_{k+1}$ vector at each step: $$ F(y_{k+1}) = y_{k+1}-y_k - \Delta tf(y_{k+1},t) = 0.$$
- Linear:
$$f(y) = Ay + b,$$
$$ y_{k+1} = y_k + \Delta t(Ay_{k+1}+b),$$
$$(I-\Delta tA)y_{k+1} = (y_k + \Delta tb).$$
This last equation has the form $By_{k+1}=c$, which is a linear system solved for $y_{k+1}$ at each step.
Example
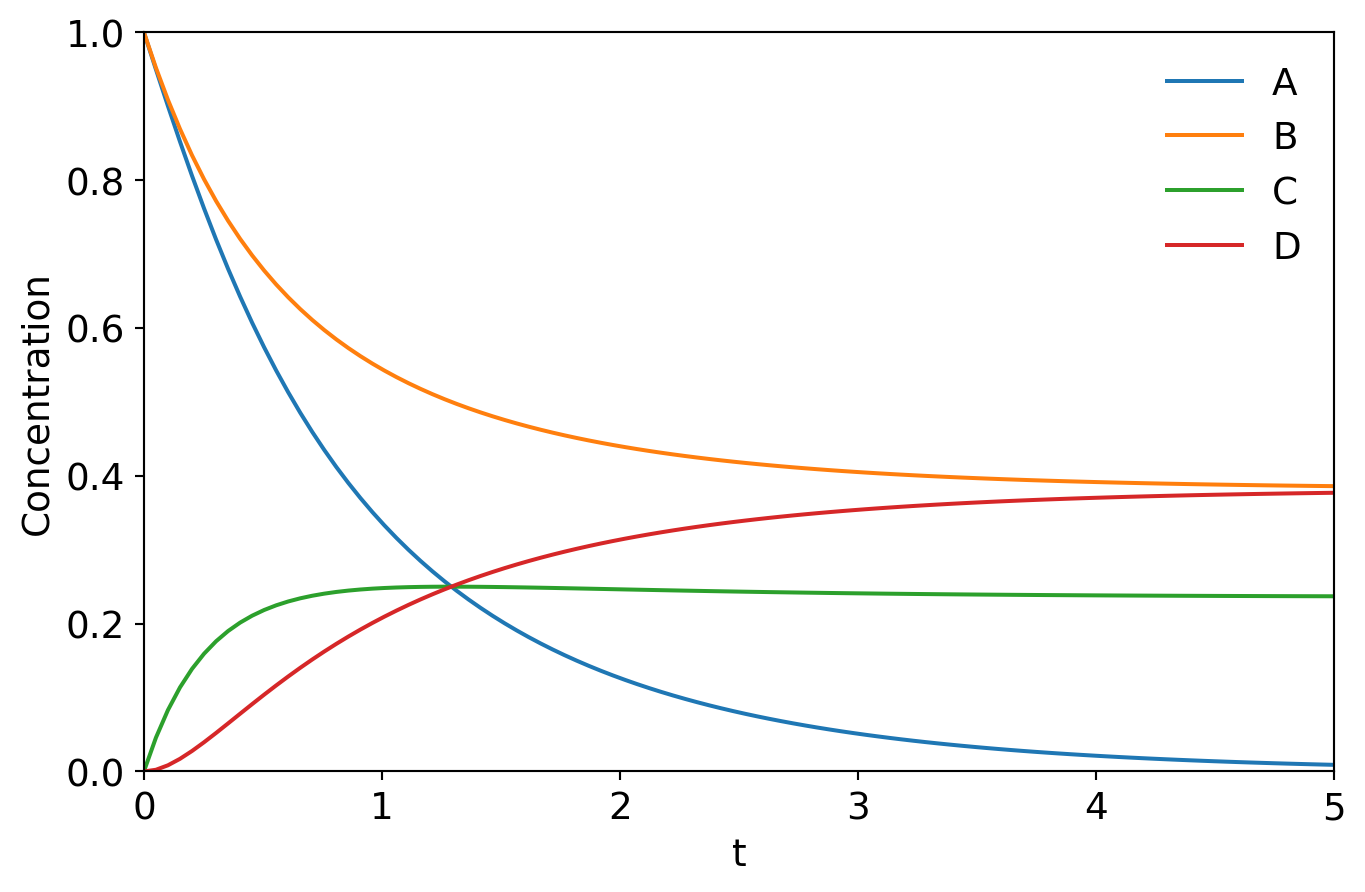
The following reactions are given:
$$A + B \rightarrow C,$$$$A + C \rightarrow D.$$
* Reactions have rate constants $k_1 = 1$ and $k_2 = 2$. * Let $A_0=B_0=1$ and $C_0=D_0=0$. * Solve to 5 seconds. * Species concentrations are given by the following rate equations:
Solve this system using the fourth order RK method:
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
def odeRK4(f, y0, t):
ns = len(t)-1
y = np.zeros((len(t), len(y0)))
y[0,:] = y0
for k in range(ns):
h = t[k+1] - t[k]
S1 = f(y[k,:],t[k])
S2 = f(y[k,:]+0.5*h*S1, t[k]+0.5*h)
S3 = f(y[k,:]+0.5*h*S2, t[k]+0.5*h)
S4 = f(y[k,:]+ h*S3, t[k]+ h)
y[k+1,:] = y[k,:] + h/6*(S1 + 2*S2 + 2*S3 + S4)
return y
def rhsf(ABCD, t):
A = ABCD[0]
B = ABCD[1]
C = ABCD[2]
D = ABCD[3]
k1 = 1
k2 = 2
dAdt = -k1*A*B - k2*A*C
dBdt = -k1*A*B
dCdt = k1*A*B - k2*A*C
dDdt = k2*A*C
return np.array([dAdt, dBdt, dCdt, dDdt])
ABCD_initial = np.array([1,1,0,0])
tend = 5
t = np.linspace(0,tend,100)
ABCD = odeRK4(rhsf, ABCD_initial, t)
plt.rc('font', size=14)
plt.plot(t,ABCD)
plt.xlabel('t')
plt.ylabel('Concentration')
plt.xlim([0,tend])
plt.ylim([0,1])
plt.legend(['A', 'B', 'C', 'D'], frameon=False);
Higher order derivatives
- A single higher order ODE results in a system of first order ODEs. $$y^{\prime\prime\prime}=\frac{d^3y}{dt^3} = f(y,y^{\prime},y^{\prime\prime},t).$$
Question: can we solve this using the techniques we have used for first order ODE’s? If so, how?
Can you convert this one third-order equation to a system of three first-order equations?
$$y^{\prime\prime\prime}=\frac{d^3y}{dt^3} = f(y,y^{\prime},y^{\prime\prime},t).$$-
let $x=y^{\prime\prime}$, then $y^{\prime\prime\prime}=x^{\prime}$.
-
let $z=y^{\prime}$, then $y^{\prime\prime}=z^{\prime}$.
-
Then the resulting system of ODEs is:
-
This is a system of three first order ODEs in three variables.
Decoupled equations
-
Consider a linear system of ODEs.
$$y^{\prime} = Ay+b.$$ -
In general, each rate equation depends on all the variables.
-
In our linear algebra review, we discussed how to decouple a system of linear equations.
- How did we do that?
-
To decouple the system, change to an eigenvector basis so that each component equation depends only on its own variable (in the new basis)
-
Let $V$ be a matrix whose columns are the eigenvectors of matrix $A$.
-
Let $\Lambda$ be a diagonal matrix whose diagonal elements are the eigenvalues of $A$.
-
Then,
$$A = V\Lambda V^{-1}.$$
- Insert this into the ODE: $$y^{\prime} = V\Lambda V^{-1}y + b.$$
- Multiply through by $V^{-1}$: $$(V^{-1}y^{\prime}) = \Lambda(V^{-1}y) + (V^{-1}b).$$
- Now, let $\hat{y}=V^{-1}y$, and $\hat{b}=V^{-1}b$: $$\hat{y}^{\prime} = \Lambda \hat{y} + \hat{b}.$$
- Because $\Lambda$ is diagonal, this system is decoupled. That is component $i$ is given by $$\hat{y}^{\prime}_i = \lambda_i\hat{y}_i + \hat{b}_i.$$
- This equation has a simple analytic solution.
- When solved, all the $\hat{y}_i(t)$ are known.
- Then $y(t)$ are given by $$y(t) = V\hat{y}(t).$$
This analysis can be useful for solving ODEs analytically, but also for analyzing (and modifying) stability properties of ODEs.
ODE Step Size
- See Numerical Recipes section 16.2 for more detailed explanations.
- When solving an ODE, we needed a step size $\Delta t$ or $h$.
- How should we select the step size?
Consider integrating $dy/dt = \tanh(t)$ * What part of the solution will dictate the step size?
- Do we have to use this step size everywhere?
- If not, how can we make the computer choose the stepsize in an “intelligent” way?
Suppose we know the error $\Delta$ for a given step size $\Delta t=h_1$. * We’ll show how to get $\Delta$ below.
Suppose we set some desired error that we are okay with on a given step, like $|\Delta|\le\epsilon = atol + |y|rtol.$ * A large $y\rightarrow$ rtol controls; * A small $y\rightarrow$ atol controls.
Given a known error for a known step, how can we change our step to get the desired error? Assume we are using the RK4 method.
Adjust $h$ to get the desired error. * For a globally $4^{th}$ order method $\rightarrow$ $\Delta = \mathcal{O}(h^5)$ $\rightarrow$ $\Delta\sim h^5$. * Then
$$\frac{\Delta_2}{\Delta_1} = \frac{\epsilon}{\Delta_1} = \left(\frac{h_2}{h_1}\right)^5,$$
* So, guess an initial $h_1$. * If the error $\Delta_1$ is too big, then redo the step using a smaller $h$ as computed using the above equation. * If the error is too small, take the step, but do the next step with a larger $h$ computed using the equation above.
How to compute $\Delta$
- See N.R.
- Two approaches:
- Step doubling
- Felberg.
Step doubling
- Consider two grids where we can either take two size $h$ steps, or one size $2h$ step:
(A) <----h---->|<----h---->
(B) <---------2h---------->
- Now, let $\Delta$ = $y_B-y_A$.
-
Recall, if the error of the method (per step) is $\mathcal{O}(h^5)$, then
-
The error in $y_{B}$ is 16 times larger than the error in $y_{A}$, so we consider $y_A$ to be exact (compared to $y_B$), and evaluate $\Delta = y_B-y_A$.
-
- Cost
- Each RK step requires 4 function evaluations.
- 3 total steps (two for grid (A) and one for grid (B)) $\rightarrow$ 12 function evaluations. Actually 11, since the grids share a starting point.
- We compare 11 required using step doubling to 8 required without step doubling.
37.5%=(11-8)/8 is the cost increase. - This cost increase pays for itself in terms of allowing (ideally) at least 37.5% fewer overall steps due to the adaptive stepsize control.
- For a given error, without adaptive stepsize, the whole time domain would have to use the most stringent step size.
Felberg
-
You can write an RK method where one linear combination of slopes results in an $\mathcal{O}(h^6)$ method, and another combination of the same slopes gives an $\mathcal{O}(h^5)$ method.
-
Then let $\Delta=y_{k+1}-\hat{y}_{k+1}$.