ODEs: Higher order IVP¶
- EE and IE are simple, but low order: globally first order.
- To get high accuracy requires many more steps: smaller $\Delta t$.
- Higher order methods give the same accuracy for larger step sizes.
Second order methods¶
ODE: $$\frac{dy}{dt} = f(y,t),$$ $$y(t=0) = y_0.$$
Modified midpoint (MM) method¶
- EE takes a step from $k$ to $k+1$ using the slope at point $k$.
- IE takes a step from $k$ to $k+1$ using the slope at point $k+1$.
- MM takes a step from $k$ to $k+1$ using the slope at point $k+1/2$.
- To get to $k+1/2$ so that we can evaluate the slope there, take a trial EE step to that point
- So, on each step we first evaluate $y_{k+1/2}$ using EE for a half step. Then we take the real full step using the slope at $y_{k+1/2}$.
Taylor series representation¶
- Write two Taylor series approximations for $y_{k+1}$ and $y_k$ centered on $y_{k+1/2}$. $$y_{k+1} = y_{k+1/2} + y^{\prime}_{k+1/2}\frac{\Delta t}{2} + \frac{1}{2}y^{\prime\prime}_{k+1/2}\left(\frac{\Delta t}{2}\right)^2+\frac{1}{6}y^{\prime\prime\prime}_{k+1/2}\left(\frac{\Delta t}{2}\right)^3\ldots,$$ $$y_{k} = y_{k+1/2} - y^{\prime}_{k+1/2}\frac{\Delta t}{2} + \frac{1}{2}y^{\prime\prime}_{k+1/2}\left(\frac{\Delta t}{2}\right)^2-\frac{1}{6}y^{\prime\prime\prime}_{k+1/2}\left(\frac{\Delta t}{2}\right)^3\ldots,$$
- Subtract the second equation from the first and solve for $y_{k+1}$. $$y_{k+1} = y_k + \Delta t y^{\prime}_{k+1/2} + \mathcal{O}(\Delta t^3).$$
- The method is globally $\mathcal{O}(\Delta t^2)$.
- Note, $y^{\prime}_{k+1/2} \equiv f(y_{k+1/2},t_{k+1/2}).$
- Note, this analysis was done using $y_{k+1/2}$, but the actual method doesn't use $y_{k+1/2}$, it uses the EE approximation to this value, so we really have
$$y_{k+1} = y_k + \Delta t (y^{\prime}_{k+1/2}+\mathcal{O}(\Delta t^2)) + \mathcal{O}(\Delta t^3),$$
where the $\mathcal{O}(\Delta t^2)$ term is the local error of the EE method. When we expand this we get
$$y_{k+1} = y_k + \Delta t y^{\prime}_{k+1/2}+\mathcal{O}(\Delta t^3) + \mathcal{O}(\Delta t^3) = y_k + \Delta ty^{\prime}_{k+1/2}+\mathcal{O}(\Delta t^3),$$ so there is no overall change in the global order of the method.
Implicit trapazoid (IT) method¶
- From the MM method: $$ y_{k+1} = y_k + \Delta t y^{\prime}_{k+1/2} = y_k + \Delta t f_{k+1/2}.$$
- Evaluate $$f_{k+1/2} = \frac{1}{2}(f_k + f_{k+1}).$$
- Hence,
- This method is globally $\mathcal{O}(\Delta t^2)$ accurate.
- Note how and why the method is implicit.
- Note, this method can also be written as EE from $k$ to $k+1/2$ followed by IE from $k+1/2$ to $k+1$: $$y_{k+1/2} = y_k + \frac{\Delta t}{2}f_k,$$ $$y_{k+1} = y_{k+1/2} + \frac{\Delta t}{2}f_{k+1}.$$
Modified Euler (ME) method¶
- This is like the IT method, but get $f_{k+1}$ from a full EE step:
- This is a two-step predictor-corrector method. We predict the answer using EE in the first step, then using this result, we improve (correct) the answer in the second step.
- This method is globally $\mathcal{O}(\Delta t^2)$ accurate.
Runge Kutta (RK) methods¶
\begin{align*} y_{k+1} = y_k + &hS, \\ & S = c_1S_1 + c_2S_2 + c_3S_3 + \ldots. \end{align*}
- Here, let $h\equiv\Delta t$
- $S$ is a slope $dy/dt$, evaluated from $f(y,t)$ or from a combination of $f(y,t)$ evaluated at various points $y$ in different ways.
- The $c_i$ above are coefficients of the linear combination.
- Here, we will ignore the time dependence of $f$ for simplicity and clarity.
Second order¶
\begin{align*} y_{k+1} = &y_k + h(c_1S_1 + c_2S_2), \\ &S_1 = f(y_k), \\ &S_2 = f(y_k + \beta hS_1). \end{align*}
- So, we are taking linear combinations of $h$ times the slopes evaluated at different points.
- Note in the second equation we evaluate the slope at a later time. We get to that time by taking an Euler-like step $y_k+\beta hS_1$.
- Combine the above equations:
- Again (for slides display):
- This equation contains parts at point $k$ and a part at a later time, $f(y_k+\beta hS_1)$.
- Note that $\beta hS_1 = \beta hf_k$.
- We can write all parts at point $k$ by expanding $f(y_k+\beta hS_1)$ in a Taylor series about point $k$:
\begin{align} f(y_k+\beta\Delta y_1) &= f_k + \left.\frac{\partial f}{\partial y}\right|_k\beta hS_1 + \mathcal{O}(h^2), \\ &= f_k + \beta h f_{y,k} f_k + \mathcal{O}(h^2),\\ \end{align}
where $f_{y,k}$ is the derivative of $f$ with respect to $y$ evaluated at point $k$.
- Hence,
Now, we will take a Taylor series of $y_{k+1}$ and compare it with the above green equation.
\begin{align} y_{k+1} &= y_k + y_k^{\prime}h + \frac{1}{2} y_k^{\prime\prime}h^2 + \mathcal{O}(h^3),\\ &= y_k + f_kh + \frac{1}{2}h^2(y^{\prime})^{\prime}_k + \mathcal{O}(h^3). \end{align}
- Now,
$$(y^{\prime})^{\prime} = \left.\frac{\partial f}{\partial t}\right|_k = \left.\frac{\partial f}{\partial y}\frac{dy}{dt}\right|_k = f_{y,k}f_k.$$
- Hence:
Again, the green equation above is:
- Comparing the green and red equations imples:
- So, in choosing our second order RK method, we have one degree of freedom. Choose, say, $c_1$, then $c_2 = 1-c_1$, and then $\beta = 1/2c_2.$
- There are an infinite number of possible second order methods.
Example¶
Recall our 2nd order method: \begin{align*} y_{k+1} = &y_k + h(c_1S_1 + c_2S_2), \\ &S_1 = f(y_k), \\ &S_2 = f(y_k + \beta hS_1). \end{align*}
- Let $c_1 = 1/2$, then $c_2=1/2$ and $\beta = 1$. $$y_{k+1} = y_k + \frac{h}{2}(f(y_k) + f(y_k+hf(y_k))$$
- This is the ME method.
Fourth order RK method (The RK method)¶
\begin{align*} y_{k+1} &= y_k + h\left(\frac{1}{6}S_1 + \frac{2}{6}S_2 + \frac{2}{6}S_3 + \frac{1}{6}S_4\right),\\ & S_1 = f(y_k), \\ & S_2 = f(y_k+\frac{h}{2}S_1), \\ & S_3 = f(y_k+\frac{h}{2}S_2), \\ & S_4 = f(y_k+hS_3). \end{align*}
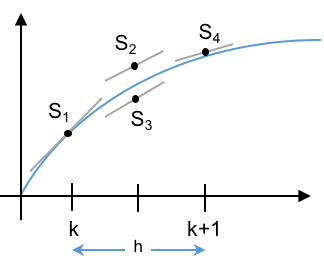
Approach¶
- Evaluate the slope $S_1$ at $y_k$.
- Take a half step EE from point $k$ to $k+1/2$ using slope $S_1$.
- Evaluate $S_2$ here.
- Take a half step EE from point $k$ to $k+1/2$ using slope $S_2$.
- Evaluate $S_3$ here.
- Take a full step EE from point $k$ to $k+1$ using slope $S_3$.
- Evaluate $S_4$ here.
- Take the final full step using a linear combination of the slopes: $$y_{k+1} = y_k + \frac{h}{6}(S_1 + 2S_2 + 2S_3+ S_4).$$
- Note how values of $y$ at intermediate step are used to compute slopes for following steps.
- For $n^{th}$ order with $n\le 4$ $\rightarrow$ $n$ function evaluations are required.
- For $>4^{th}$ order $\rightarrow$ more than $n$ function evaluations required. (Storage costs too).
- $\rightarrow$ the $4^{th}$ order method gives the most bang for the buck.
RK4 code¶
- Solve $dy/dt = -y$ from $t=0$ to $t=5$ with RK4 and EE. Use 10 steps, so $\Delta t = 0.5$. Let $y_0=1$.
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
def odeRK4(f, y0, t):
ns = len(t)-1
y = np.zeros(ns+1)
y[0] = y0
for k in range(ns):
h = t[k+1]-t[k]
S1 = f(y[k],t[k])
S2 = f(y[k]+0.5*h*S1, t[k]+0.5*h)
S3 = f(y[k]+0.5*h*S2, t[k]+0.5*h)
S4 = f(y[k]+ h*S3, t[k]+ h)
y[k+1] = y[k] + h/6*(S1 + 2*S2 + 2*S3 + S4)
return y
def odeEE(f, y0, t):
ns = len(t)-1
y = np.zeros(ns+1)
y[0] = y0
for k in range(ns):
h = t[k+1]-t[k]
y[k+1] = y[k] + h*f(y[k],t[k])
return y
def f(y, t):
return -y
#----------------------
y0 = 1.0
tend = 5.0
t = np.linspace(0,tend,11)
#----------------------
y_RK4 = odeRK4(f,y0,t)
y_EE = odeEE(f,y0,t)
tt = np.linspace(0,tend,100)
y_Exact = np.exp(-tt)
#----------------------
plt.rc('font', size=14)
plt.plot(tt,y_Exact,'k--')
plt.plot(t, y_RK4, 'o')
plt.plot(t, y_EE, '^')
plt.legend(['exact', 'RK4', 'EE'], frameon=False)
plt.ylabel('y')
plt.xlabel('t');
